The Bark Bowl
The Bark Bowl
I would like to name my project, The Bark Bowl. My idea is to design a snack dispenser that would let a snack out each time my dog barks from a certain distance from the dispenser. For this project, I wanted to work on my previous blog post idea for my pet dog’s water dispenser. I really wanted to experiment with the idea of my dog giving an audio cue when he wants a snack from the dispenser.
I recorded a bark that I had saved from when I took one of his videos and played that track to train the teachable machine model. My concept is to build the prototype of a snack dispenser that lets out a snack each time it identifies my dog’s bark.

What I also find interesting about this topic is to not only train the teachable machine model to recognize my dogs bark but to also in turn to make my dog identify the concept that his bark could make the dispenser give a snack. The exercise could help both the machine and my dog communicate with each other for a specific output.
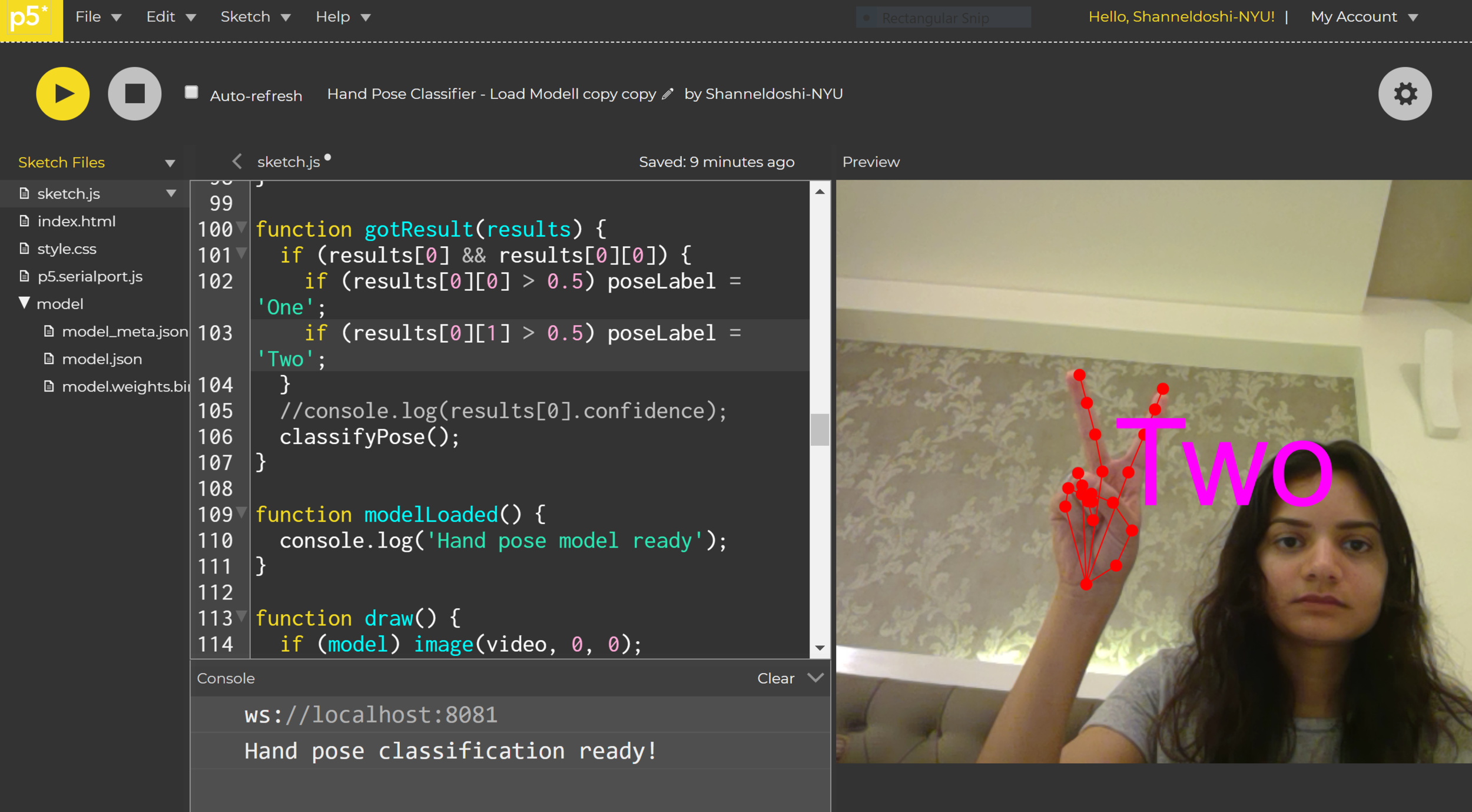
I am imagining training the teachable machine model on p5.js and connect the serial communication to my Arduino which would rotate a servo to a certain degree, allowing the snack to fall into the dog bowl.

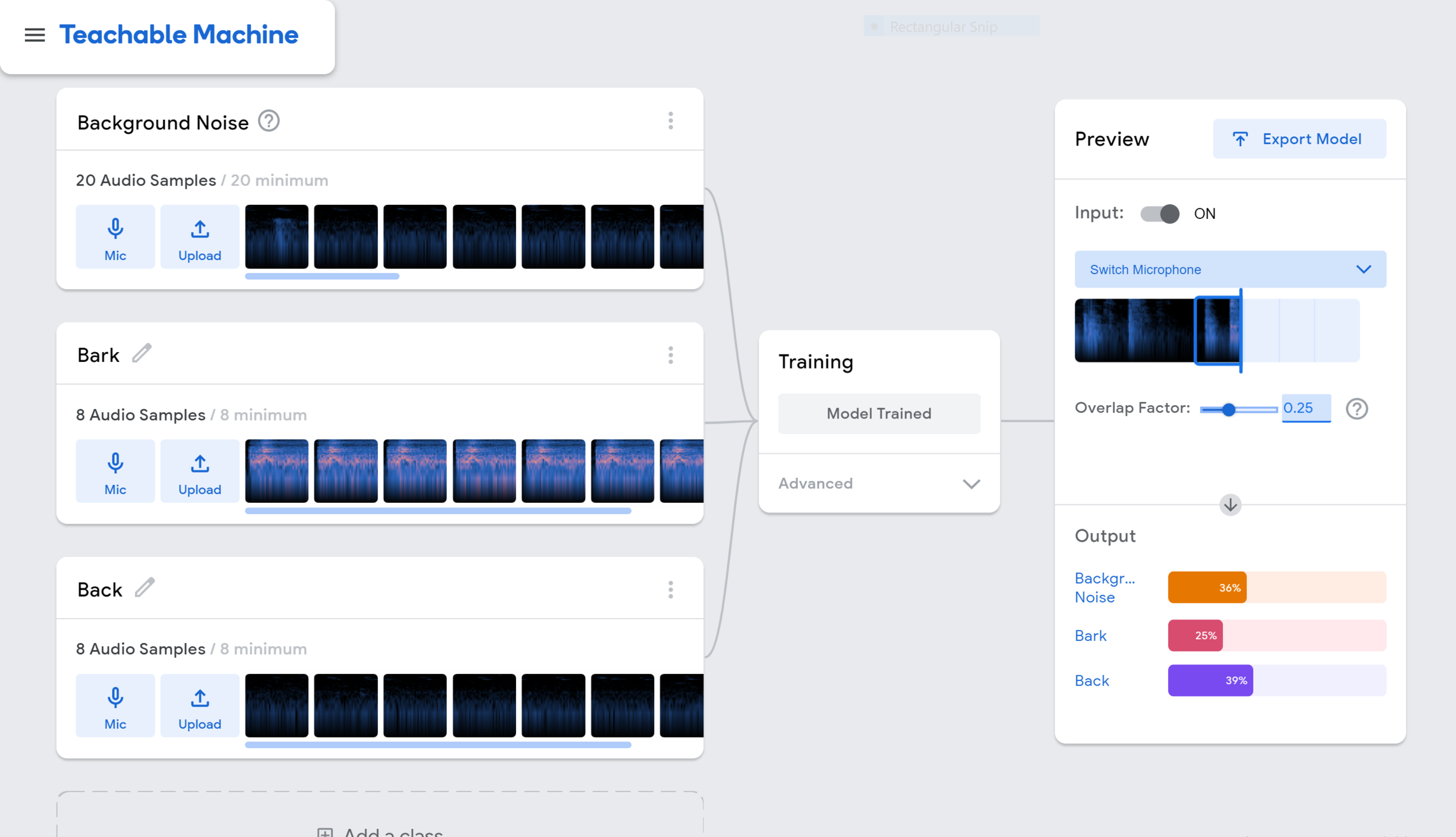
The previous teachable machine model did have a lot of background noise that I did not pay enough attention too. Hence, this time I trained the model again, creating three classes: Background noise, Bark and Back. This is to make sure that the servo goes back to the rest position, myservo.write(0);
I began to finally put my structure together by painting a cardboard box and putting the servo motor and arduino hidden inside the box.


Question to think about:
The data collected for the dog’s barking class could really vary.
The distance of the dog from the dispenser, making the bark intentional for a snack
How to let only one piece of snack out at a time
Maybe set a limit to the amount of snack that can be let out every few hours